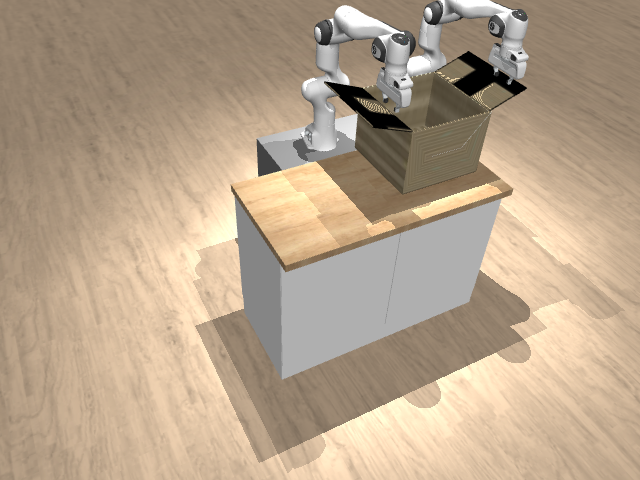
Pack Box#
Pack objects into a box using both arms.
from roboeval.envs.pack_objects import (
PackBox,
PackBoxPosition,
PackBoxOrientation,
PackBoxPositionAndOrientation
)
Variations: 4
Task Description#
Close the flaps of an open packing box using both robot arms. The box has two flaps that must be closed to achieve success.
Success Criteria#
Both box flaps closed (joint states close to 0, within 0.1 tolerance)
Task Stages:
Stage 1: Left gripper grasping left flap
Stage 2: Right gripper grasping right flap
Stage 3: Right flap closed
Stage 4: Left flap closed
Stage 5: Both flaps fully closed
Key Skills#
Multi-object manipulation
Spatial planning
Efficient packing
Gentle placement