Manipulation Tasks#
Basic bimanual manipulation primitives.
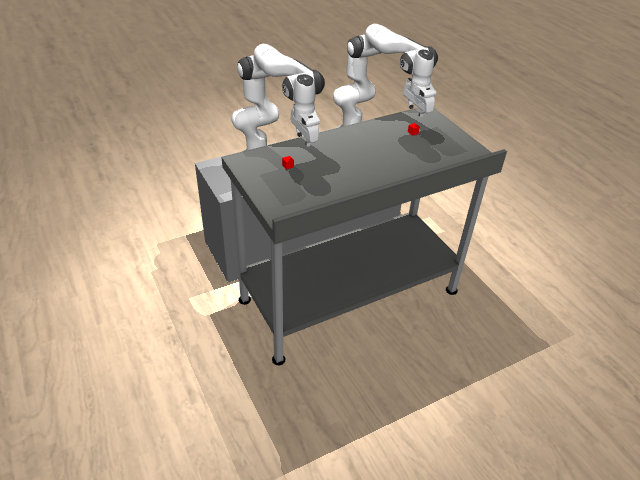
StackTwoBlocks#
Stack one cube on top of another using bimanual coordination.
from roboeval.envs.manipulation import (
StackTwoBlocks,
StackTwoBlocksPosition,
StackTwoBlocksOrientation,
StackTwoBlocksPositionAndOrientation
)
Variations: 4
Task Description:
The robot must stack two blocks on top of each other. The bottom block must remain on the table, and the top block must be placed on the bottom block.
Success Criteria:
Bottom block is colliding with the table
Top block is colliding with the bottom block
Top block is NOT colliding with the table
Neither gripper is holding either block
Task Stages:
Stage 1: Grasping one of the blocks
Stage 2: Grasping the other block
Stage 3: Blocks successfully stacked
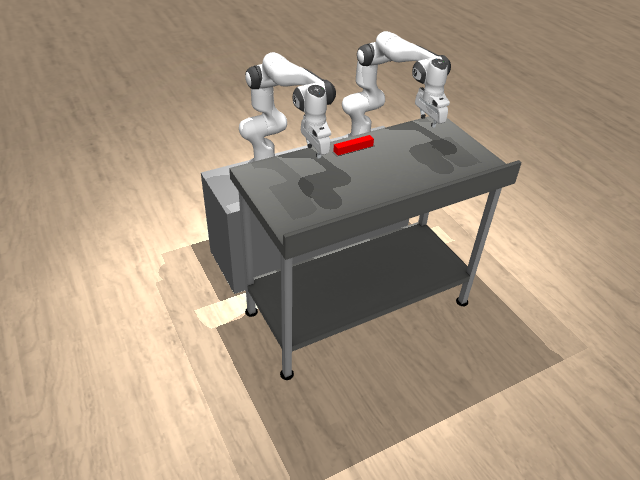
CubeHandover#
Transfer a cube (rod-shaped object) from one gripper to the other.
from roboeval.envs.manipulation import (
CubeHandover,
CubeHandoverPosition,
CubeHandoverOrientation,
CubeHandoverPositionAndOrientation,
VerticalCubeHandover
)
Variations: 5 (including VerticalCubeHandover)
Task Description:
The robot must grasp a cube with one gripper, then transfer it to the other gripper. The task tracks which gripper initially holds the object and requires successful transfer to the opposite hand.
Success Criteria:
Cube initially grasped by one gripper (left or right)
Cube successfully transferred to the opposite gripper
Initial gripper no longer holding the cube
VerticalCubeHandover:
A variant where the cube is oriented vertically (rotated 90°) during the handover, requiring different grasping strategies and maintaining vertical orientation.
Task Stages:
Stage 1: Cube grasped by initial gripper
Stage 2: Cube successfully transferred to opposite gripper
Key Skills#
Basic grasping
Bimanual coordination
Object transfer
Spatial precision